|
Grundlagen:
Der nach seinem Erfindern benannte GM-Kühler arbeitet wie ein
Stirling Kühler nach dem rekuperativem Prinzip. D.h. in einem Zwischenspeicher
, Regenerator, wird Wärme abwechselnd gespeichert und wieder abgeführt.
Im Gegensatz zum Stirlingkühler werden beim GM-Kühler die erforderlichen
Druckimpulse nicht mit einem Kolben, sondern über Ventile erzeugt.
|
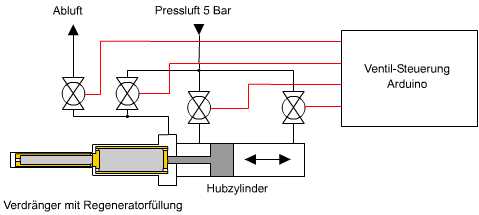 |
Die beiden
Bilder zeigen den Aufbau. Der Antrieb des Verdrängerkolbens
erfolgt mit einem kleinen Pneumatikzylinder mit 1cm Kolbendurchesser
und einem maximalem Hub von 10 mm. Der Arbeitskolben des Zylinders
wird durch Druckluft bewegt. Die dazu erforderlichen Ventile
werden mit einer Steuerschaltung (mit Arduino) elektrisch
betätigt.
Der eigentliche GM-Zylinder besteht aus dünn wandigen
V2-Rohr und ist zweistufig ausgeführt um tiefere Temperaturen
zu erreichen.
|
|
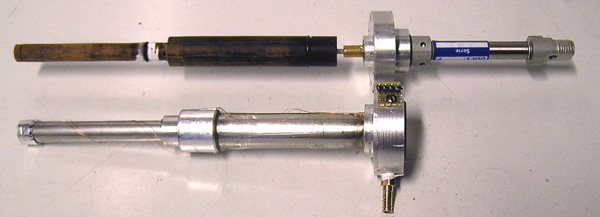 |
Der Verdrängerkolben
ist aus Novotex (Pertinax). In einer Bohrung des Verdränger befindet
sich der Regenerator ein Stapel aus etwa 200 Edelstahl-Siebchen mit
einer Maschenweite von 60µm bei einer Drahtstärke von 40µm.
Auch der GM-Zylinder wird über elektrisch gesteuerte Ventile
be- und entlüftet. Der Einfachheit halber wird auch hier Pressluft
mit 5 Bar Druck verwendet. Wesentlich bessere Ergebnisse könnten
vermutlich aber mit einem höheren Druck und Helium als Arbeitsgas
erzielt werden. |
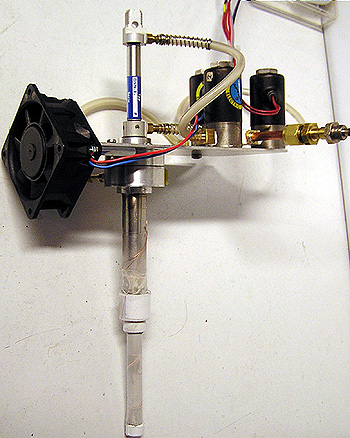 |
Das rechte Bild
zeigt den fertigen Aufbau des Kühlkopfes mit den Ventilen und
einem kleinen Lüfter zur Kühlung. Der GM-Kühler arbeitet
wie eine Wärmepumpe deshalb muss die vom Kaltkopf nach oben transportierte
Wärme dort abgeführt werden, zudem wird der Pneumatikzylinder
etwas warm. Zum Betrieb wird der Kühlkopf in ein Vakuumgefäß
eingebaut um Verluste durch Wärmeleitung zu vermeiden und so
eine möglichst tiefe Temperatur zu erreichen. Die Temperaturen
der 1. und der 2. Stufen wierden mit Pt1000 Widerständen gemessen.
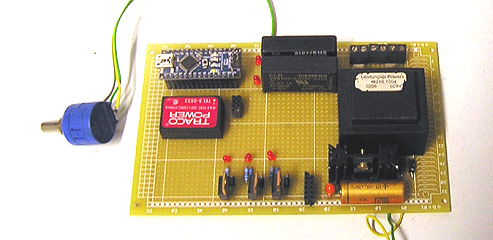
Die Arduinosteuerung ist fürs erste auf eine Platine aufgebaut.
Da es sich bein den verwendeten Ventilen um 2-Wege Typen handelt werden
nur 3 Stück benötigt. Für die Spulen der Ventile wird
eine Schaltspannung von 18V benötigt. Drei vom Arduino gesteuerte
Darlington-Transistoren erledigen diese Aufgabe |
 |
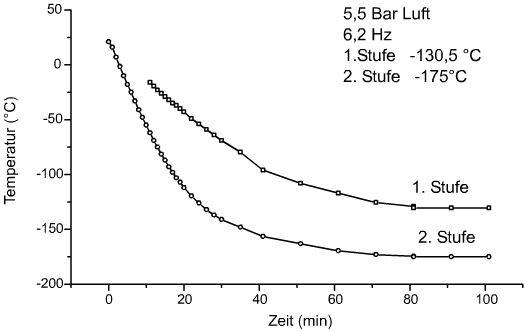 |
Der GM-Kühler erreicht
nach etwa 90 Minuten eine Temperatur von -175°C entsprechend 98,15°K.
Der Druck der Pressluft betrug 5,5 Bar und der Kühler wurde mit
einer Frequenz von 6,2 Hz betrieben.
Die Temperatur kann mit Pressluft als Betriebsgas kaum unterschritten
werden, da Luft, bestehend aus Stickstoff und Sauerstoff bei diesen
Temperaturen flüssig wird. Dadurch werden Teile des Regenerators
verstopft wodurch das Stirlingprinzip natürlich nicht mehr funktioniert.
Um noch tiefere Temperaturen zu erreichen müßte deshalb
ein anderen Arbeitsgas z.B. Helium verwendet werden.
Allerdings ist die Umstellung nicht so einfach. Beim jetzigen Aufbau
wird das Gas zur Entspannung einfach abgelassen, beim teuren Helium
sollte man natürlich einen geschlossenen Kreislauf verwenden.
Desweiteren müßte der Druck deutlich erhöht werden
um die gleiche Kälteleistung zu erreichen. Zwar ist die spezifische
Wärme von Helium (5193 J/(kg · K) deutlich größer
als die von Luft (ca. 1040 J/(kg · K) aber durch die wesentlich
kleinere Dichte des Heliums ist auch die Wärmekapazität
des Gasvolumens kleiner |
| |
|
|
