Für den privaten Nutzer mit kleinem Geldbeutel werden
hauptsächlich von zwei Firmen Sonargeräte verschiedener Ausführungen
hergestellt, zum Einen die Firma
>Hummínbird<
und zum Anderen
>Lowrance<.
Das Angebot beider Firmen wendet sich an Sportfischer und Sportbootfahrer
aber natürlich können die Geräte auch zur Exploration verwendet
werden.
Der
Lowrance Elite-4x DSI Fischfinder ist schon für etwa 200€
zu haben und stellt eine gute Basis für eigene Experimente dar. Dieses
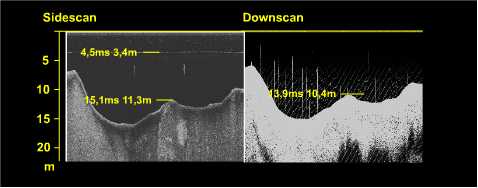
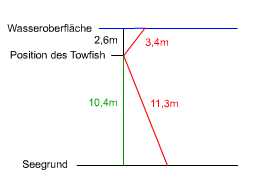
Gerät arbeitet nach dem "Downscan Imaging" Verfahren. Dabei
wird ähnlich wie beim
>Sidescan<
ein fächerförmiger Schallstrahl erzeugt, aber nicht zur Seite,
sondern senkrecht nach unten abgestrahlt. Dadurch kann der Grund mit hoher
Auflösung abgetastet werden.
Aber es spricht natürlich nichts dagegen den Transducer seitlich
anzuordnen um zum Sidescan Mode überzugehen. Wird die Stellung des
Transducers periodisch verändert kann sowohl beide Seiten wie auch
den Grund abtastet werden. Natürlich ist das Gerät nicht in
der Lage die gemischten Signale richtig darzustellen, aber das kann ein
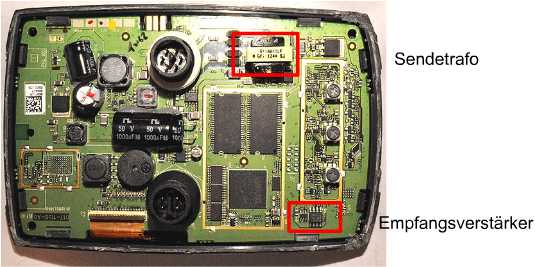
PC übernehmen. Glücklicherweise ist der Empfangsteil des Gerät
mit diskreten Bauteilen aufgebaut und arbeitet analog. Somit ist es kein
Problem das Echosignal an geeigneter Stelle abzugreifen und dem PC zuzuführen.
Dazu muss natürlich das Gerät geöffnet werden was nicht
ganz einfach ist da es wasserdicht verklebt wurde. Aber mit einer feinen
Säge und einem Schraubenzieher ist es zu schaffen. Es müssen
zwei Signale abgegriffen werden, das Echosignal und das Sendeimpulssignal
um eine zeitliche Zuordnung zu ermöglichen.