Unterwasser-Roboter
|
Ein Unterwasser-Roboter, kurz ROV (remote operated vehicle) ist ein
praktisches Gerät wenn man Unterwasser Bilder machen, Filme aufnehmen
oder andere Arbeiten vornehmen möchte ohne selbst ins kalte, verschmutzte
oder tiefe Wasser zu müßen. Obwohl der Bau eines ROVs nicht
ganz in des bisherige Arbeitsgebiet von Rapp-Instruments fällt
wurde doch der Bau eines solchen Geräts beschlossen, geplant und
ausgeführt.
|
|
Aufbau:
Die meistens kommerziellenund Selbstbau-ROVs werden in Open-Frame-Bauweise
ausgeführt. Alle Bauelemente wie Druckkörper, Schwimmkörper,
Antrieb, Sensoren und Werkzeuge werden an einem offenen Rahmen montiert,
so sind spätere Änderungen und Anbauten leicht möglich.
Eine stromlinien förmige Verkleidung des Geräts ist bei den
meist langsamen Geschwindigkeiten nicht notwendig.
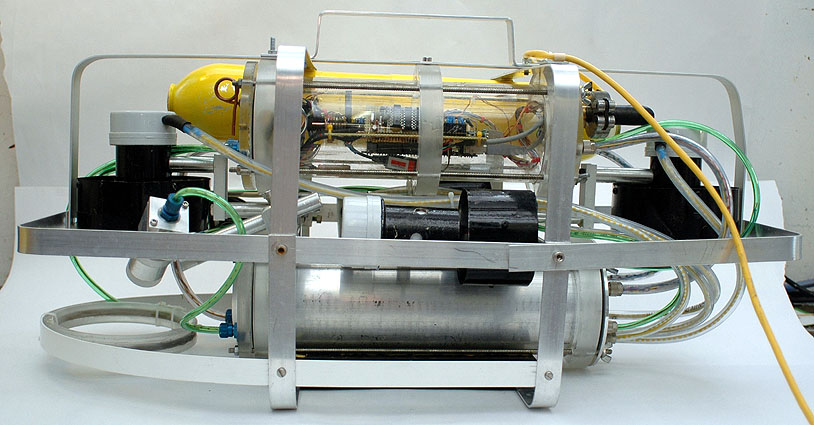
Das ROV besteht aus zwei übereinander stehenden Röhren die in
einem Rahmen aus Flachalubändern befestigt sind. In der unteren Aluröhre
befindet sich der Camcorder, das Akupack und die Leistungselektronik zur
Motorsteuerung.
Die obere Röhre ist aus Plexiglas und beinhaltet den Steuerrechner
(Arduino Mega), diverse Interfaces, die Echolotelektronik (umgebauter
Fishfinder), und die Elektronik eines Metalldetektors.
Im Bug und Heck des ROVs sind die beiden senkrechten Antriebe zum Auf-
und Abtauchen, seitlich die beiden Antriebe zur Vor- und Rückwärtsfahrt
angebracht. Ebenfalls seitlich sind die beiden Auftriebskörper aus
Aluflaschen angebracht. Die Außeneinheiten, Manöverkamera,
Echolotsensor, LED-Scheinwerfer und Metallsuchspule befinden sich im Bug
des ROVs.
|
 |
|
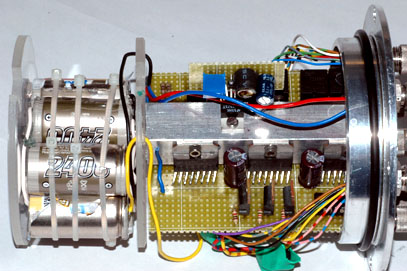
Seitenansicht mit entferntem Backbord-Auftriebskörper
|
|
 |
 |
|
Akkupack und Motorelektronik
|
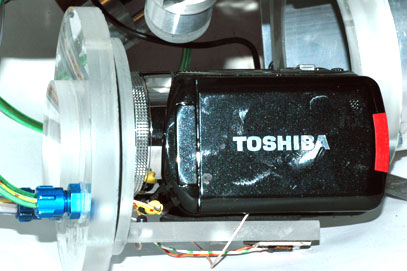
Camcorder
|
|
Der Akkupack besteht aus 10 NiMH-Zellen
mit einer Kapazität on 2400 mAh und einer Gesamtpannung on 12V. Die
Leistungelektronik zur Motorsteuer verwendet H-Brückentreiber L298
die vom Arduinoboard mit PWM-Signalen gesteuert werden. Durch die effektive
Wasserkühlung der Leistungshalbleiter über den hinteren Aluflansch
können die Grenzwerte der Treiber voll ausgereizt werden.
Der Toshiba HD-Camcorder wird über seine IR-Schnittstelle ferngesteuert. |
 |
 |
|
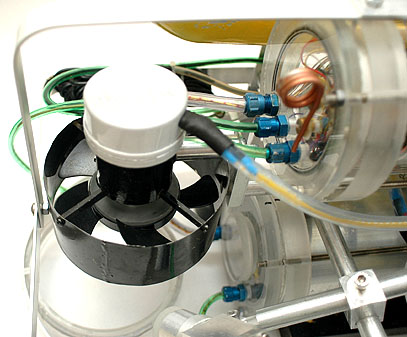
Bugmotor
|
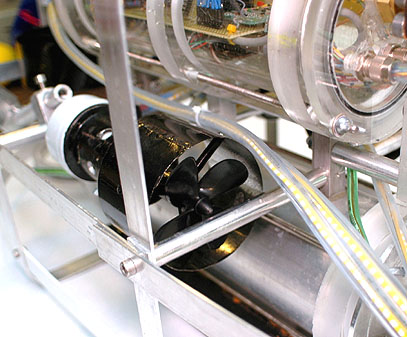
Backbordmotor
|
|
| Die 4 Antriebe des ROVs sind umgebaute Bilgepumpen. Solche Pumpen sind
vergleichsweise billig zu erhalten und zumindest bis zu Tiefen von eingen
Metern wasserdicht. Sollte dennoch mal eine durch Wassereinbruch ausfallen
ist sie leicht zu ersetzen. Zur Verwendung als Antrieb wird das eigentliche
Pumpengehäuse entfernt und statt des Impellers passende Schiffschrauben
auf die Motorachse gesetzt. Der Antrieb ist allerdings nicht sehr kräftig
und entwickelt einen Schub von etwa 1,5 N bei 12 V. Für langsames Fahren
und Ab- und Auftauchen reicht das aber aus ansonsten müßten stärke
Pumpen erwendet und/oder die Batteriespannung erhöht werden. |
| Sensoren: zur Navigation und für sonstige
Aufgaben sind diverse Sensoren eingebaut. |
| Drucksensor |
MPX5200 |
Sensor zur Messung des Wasserdrucks und damit der Tauchtiefe |
| Temperatursensor |
Pt1000 |
Sensor zur Messung der Wassertemperatur |
| Magnetfeldsensor |
HMC5883LH |
3-Achsenmagnetfeldsensor als elektronischer Kompass |
| Beschleunigungssensor |
ADXL330 |
3-Achsenbescleunigungssensor zur Lageregelung |
| Echolot |
Fishfinder |
umgebauter Fishfinder zur Messung der Höhe Grund |
| SW-Kamera |
|
Außenkamera zur Navigation |
| Metalldetektor |
|
VLF-Detektor zur Ortung von Metallgegenständen |
| Leifähigkeitsmesser |
|
Detektor für Wassereinbrüche in der oberen
und unteren Röhre |
|
Verbindungskabel:
Die Verbindung des ROVs zur mit der Landeinheit erfolgt über
ein 100m langes Netzwerkkabel. Dieses Cat5-Kabel hat vier Aderpaare
die folgender maßen benützt werden. |
| blau, blau/weiß |
Videokanal, durch Baluns symmetriert |
| braun, braun/weiß |
RS485 Daten zum ROV |
| orange, orange/weiß |
RS485 Daten vom ROV |
| grün, grün/weiß |
+12V, Hauptrelais |
|
|
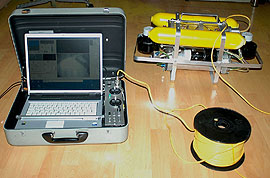
Landstation:
mit der Landstation wird das Rov vom Ufer oder von einem Boot aus
gesteuert. Die von den Seuerknüppeln und den Schaltern kommenden
Signale werden mit einem Arduino Nano Controller in RS485 Kommandos
gewandelt und zum ROV gesandt. Die Sensordaten und die Videosignale
werden in einem Labtop aufgenommen und dargestellt. Sowohl das Programm
im Steuercontroller wie im ROV sind mit der bei Arduinos üblichen
Sprache Wiring (eine Abart von C ) geschrieben. Das Aufzeichnungsprogramm
im Labtop ist mit der Pascal-Sprache Delphi programmiert.
Labtop und Steuereinheit sind in einen Alukoffer eingebaut sodass
eine kompakte und leicht transportable Einheit entsteht. Die Steuereinheit
besitzt zwei Steuerknüppel die das Tauchen und Steigen, die Vorwärts-
und Rückwärtsfahrt und das Drehen auf der Stelle bewerkstelligen.
Weitere Schalter steuern die Funktionen der Kamera wie Aufnahme, Schnappschuss
und Zoom sowie das Schalten des LED-Scheinwerfers.
|
 |
 |
|
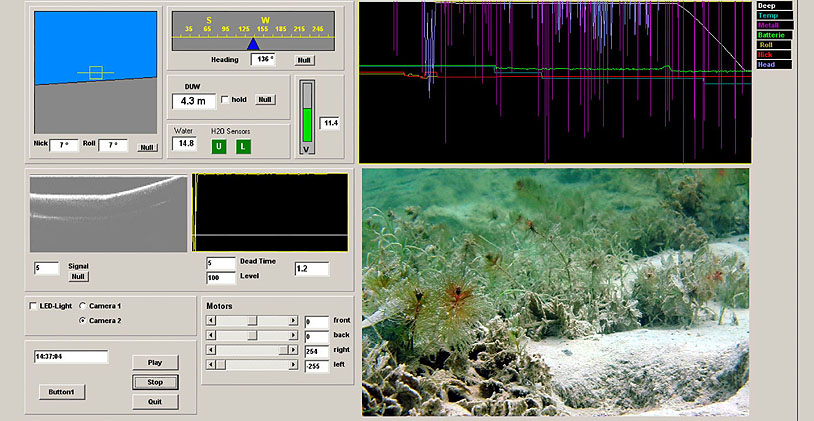
| Das GUI-Programm im Labtop speichert alle wichtigen Daten des ROVs und
stellt sie grafisch dar. Links oben ein künstlicher Horizont der die
Daten des Lagesensors verarbeitet, daneben die Anzeige des Kompasssensors.
Unter dem Kompass die Anzeige der Wassertiefe, der Wassertemperatur, der
Batteriespannung und die beiden Leckdetektoren. Links in der Mitte die Anzeige
des Echolots und Metalldetektors, darunter die Kamerafunktionen. Unten links
die Funktionen zum Abspielen aufgezeichneter Tauchgänge, daneben die
Anzeige der Motorspannungen. Rechts oben der zeitliche Verlauf der Parameter
und darunter das eingeblendete Videobild. |
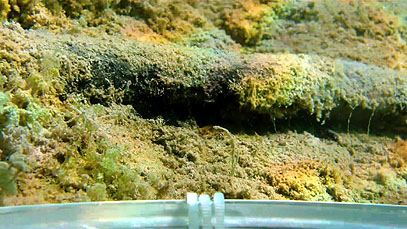
Einsatz:
das ROV hat mittlerweile fünf Tauchgänge in über vier
Meter Tiefe absolviert und dabei einige Wassereinbrüche durchgemacht.
Erstaunlich ist dass selbst der nass gewordene Camcorder nach dem
Trocknen wieder einwandfrei funktioniert. Mittlerweile sind aber alle
Lecks gefunden und beseitigt. |
 |
 |
 |
Ein Problem ist der geringe Kontrast des
Labtopbildschirms der ein Arbeiten bei hellem Sonnenlicht schwierig
macht. Ein weiteres Problem war die geringe Standzeit des Akkupack(
2,4 Ah), das mittlerweile aber durch eine Bleigelbatterie von 14 Ah
ersetzt wurde.
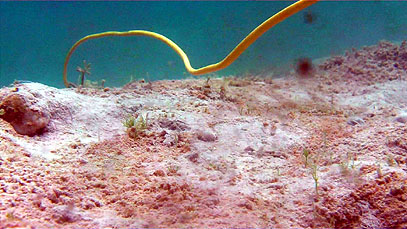
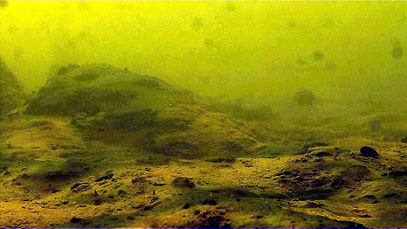
Erfreulich hingegen ist die hohe Qualität der Camcorderbilder,
die sauberes Wasser vorausgesetzt, Aquariumqualität erreichen. |
|
|
|
| |
| |
| |
| |
| |