|
Für den Bau von ROVs ist es sehr interessant mal den Schub der
Eigenbauthruster zu messen.
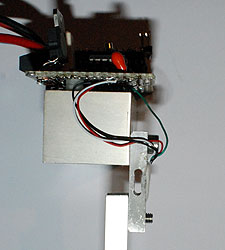
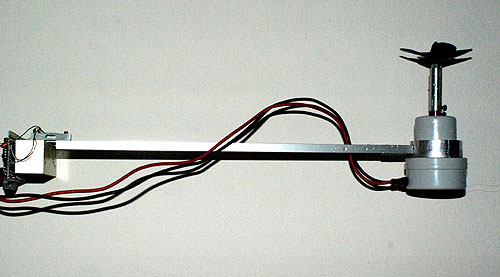
Zu diesem Zweck werden die Thruster an einer Kraftmesseinrichtung befestigt.
Diese besteht im wesentlichen aus einer Wägezelle mit Dehnungsmessstreifen.
Durch die einwirkende Kraft verbiegt sich die Wägezelle und diese
Verbiegung wird durch die Messstreifen in eine Widerstandsänderung
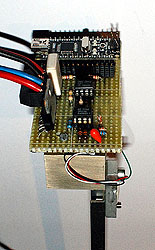
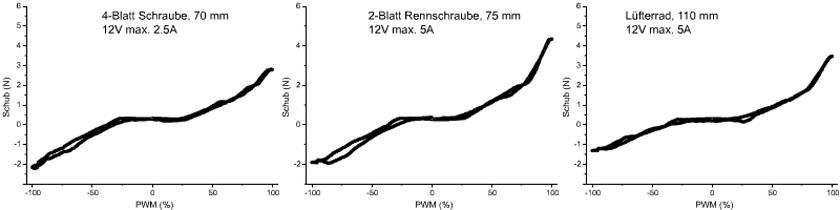
verwandelt.Diese Widerstandsänderung wird zusammen mit dem Motorstrom
gemessen und ergibt das Strom/Schubdiagramm.
Die Wägezelle mit Messstreifen wurden einer billigen Digitalhandwaage
von Voltcraft ( Conrad Best.- Nr 124148-62,€ 37,37 ) entnommen.
Um den recht kleinen Schub mit guter Auflösung messen zu können
wird die Kraftwirkung mit einem Hebel vergrößert. Kalibiert
wird die Messeinrichtung durch Auflegen von Gewichten auf den Messhebel.
|