Echolot
|
|
Mit einem Echolot können einfach Entfernungen gemessen werden.
Im vorliegenden Fall geht es um Entfernungsmessungen unter Wasser. Dazu
wird ein Schallsignal abgestrahlt. Der Schallimpuls wird von einem Hinderniss
reflektiert und nach seiner Rückkehr gemessen. Aus der Laufzeit
des Signals kann bei bekannter Ausbreitungsgeschwindigkeit der Abstand
zum reflektierendem Hinderniss gemessen werden. Käufliche Echolote
arbeiten meist im Ultraschallbereich. Je größer die zu messende
Entfernung ist um so tiefer muss die verwendete Schallfrequenz liegen,
da die Dämpfung der Schallwellen im Wasser mit der Frequenz stark
ansteigt.
Kleinere Echolote für Sportboote arbeiten oft mit Frequenzen um
200 kHz, damit werden Enfernungen von etwa 100 Metern erreicht. Große
Geräte zur Kartierung des Meeresgrunds in einigen Tausend Metern
Tiefe verwenden deutlich tiefere Frequenz von einigen Kilohertz.
Obwohl der Bau eines Echolots keine größere Herausforderung
darstellt wird hier auf ein billiges käufliches, Gerät zurückgegriffen.
Der Fishfinder wurde für ca. 40€ bei Ebay gekauft. Für
das Geld bekommt man ein kleines Handecholot mit zugehörigem Transducer.
Das Gerät arbeitet mit einer Schallfrequenz von 200 kHz und die
Reichweite beträgt 100 m.
|
|
|
|
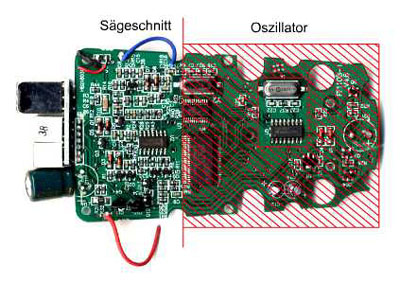
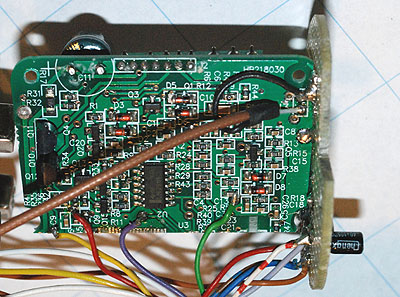
| Nach dem Entfernen des Gehäuses sieht man dass
nur ein Teil der Platine von den Bauteilen der eigentlichen Echolotfunktionen
belegt ist. Der Rest der Platine ist vom dem Mikrokontroller zur Ablauf
und Anzeigensteuerung und seiner Peripherie belegt. Da diese Funktionen
vom Arduino übernommen werden sollen wurde die Platine zersägt.
Vom Rest der Platine wurden nur die Bauteile des 200 kHz Oszillators
verwendet. |
|
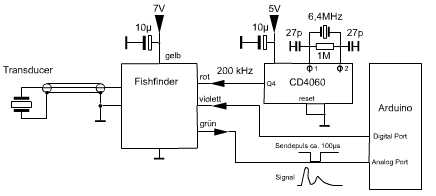
Das Echolot wird von einem
ArduinoNano angesteuert. Der circa 50 bis 100 µs lange Sendepuls
wird an einem Digitalport des Controllers ausgegeben. Das empfangene
Echosignal wird über einem Analogport eingelesen und die Messwerte
in einem Array abgespeichert. Für einen Messschleifendurchlauf
benötigt der mit 16 MHz getaktete Controller circa 112 µs.
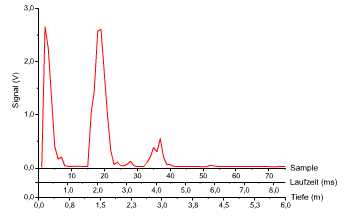
Aus der Laufzeit errechnet sich die Distanz s = (c x t) / 2
mit c = 1500 m/s. So lässt sich die maximale Auflösung zu
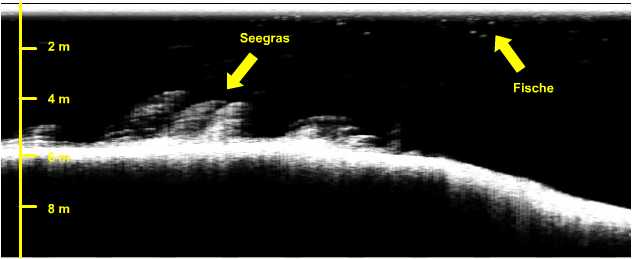
etwa 8 cm bestimmen. Auf dem rechten Diagramm ist der gemessene Signalverlauf
zu sehen. Ganz links sieht man das Übersprechen des Sendepulse,
nach circa 2 ms folgt der vom Seegrund reflektierte Empfangspuls.
Nach 4 ms folgt noch ein Puls der durch Mehrfachreflektion entsteht.
Man sollte aber bedenken dass die Schallgescwindigkeit im Wasser keine
Konstante ist sondern vielen Faktoren wie z.B Temperatur und Salzgehalt
abhängt. Schwierig wird es durch den Umstand dass Temperatur
des Wasser meist mit der Wassertiefe abnimmt.
|
 |
|
|
Wird das empfangene Signal in geeigneter Weise
auf dem PC dargestellt erhält man, trotz des einfachzen Geräts
und der niedrigen Auflösung bei 200 kHz, eine ausagekräftige
Darstellung des überfahrenen Seegrunds. Auf dem unteren Bild
sind neben dem, von 6 auf 8 Meter Tiefe abfallenden, weichen Seegrunds
auch Seegraswiesen und einzelne Fische zu sehen.
|
|
|
|