Sonar Cat (in
Arbeit)
|
||||||||||
|
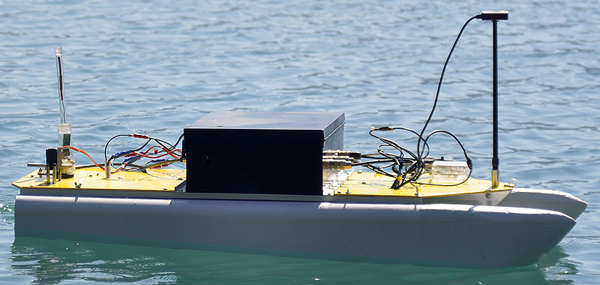
Zum Test verschiedener Geräte wurde ein Catamaran
gebaut.
Für die beiden Schwimmkörper wurden PVC-Lüftungsrohre verwendet. Die Rohre wurden mit Spitzen aus Hartschaum und Sperrholz versehen, der Heck kseitige Abschluss ist eine Plexiglasplatte. In jedem Schwimmer befindet sich ein Akkupack (NiMH, 6V 2400mAh). Die Schwimmer wurden mit PU-Schaum ausgefüllt. So können bei Dichtigskeit-Problemen die Schwimmer nicht volllaufen, es bleibt immer ein positiver Auftrieb und das Boot ist unsinkbar, ganz im Gegensatz zum >Vorgänger<. |
||||||||||
|
||||||||||
|
||||||||||
|
||||||||||
|
|
||||||||||
|
|
||||||||||